Yolov8关于创新点的讨论
L如果你害怕失敗,那你很有可能會失敗。 If you’re afraid to fail, then you’re probably going to fail.
Yolov8关于创新点的讨论
移动检测应用
通过上传模型到roboflow网站,roboflow提供api接口就可以在本地进行推理。
同时,通过ios的sdk,可以在移动端上进行推理。
from inference import InferencePipeline
from inference.core.interfaces.stream.sinks import render_boxes
pipeline = InferencePipeline.init(
api_key="*****",
model_id="******",
video_reference="./pipelinecrack.mp4",
on_prediction=render_boxes,
)
pipeline.start()
pipeline.join()像是unix/linux环境
命令行直接执行下面命令也可以进行本地推理。
inference infer -i "./pipelinecrack.mp4" -m "*****" -o "./out.mp4" --api-key "****"__*号表示模型和密钥 __
opencv对数据集的预处理
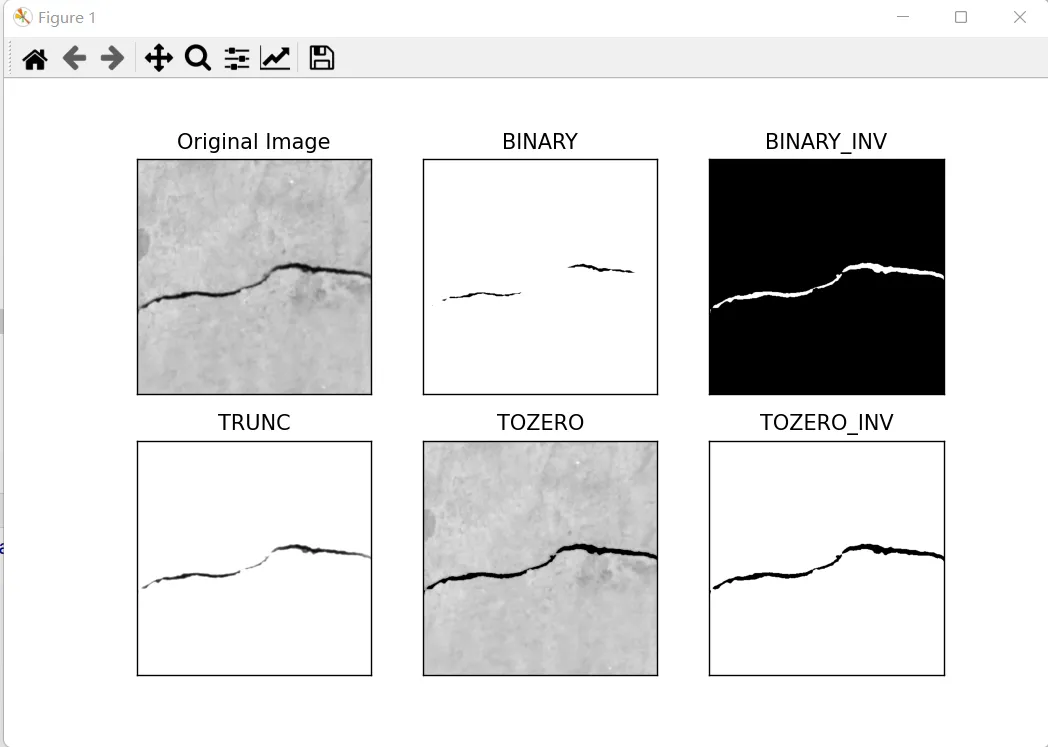
方法一:阈值分割
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
img = cv.imread('../data/lf2.png',0)
cv.imshow("temp",img)
ret,thresh1 = cv.threshold(img,45,255,cv.THRESH_BINARY)
print(ret)
ret,thresh2 = cv.threshold(img,127,255,cv.THRESH_BINARY_INV)
print(ret)
ret,thresh3 = cv.threshold(img,127,255,cv.THRESH_TRUNC)
print(ret)
ret,thresh4 = cv.threshold(img,127,255,cv.THRESH_TOZERO)
print(ret)
ret,thresh5 = cv.threshold(img, 127, 255, cv.THRESH_BINARY + cv.THRESH_OTSU)
print(ret)
titles = ['Original Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in range(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
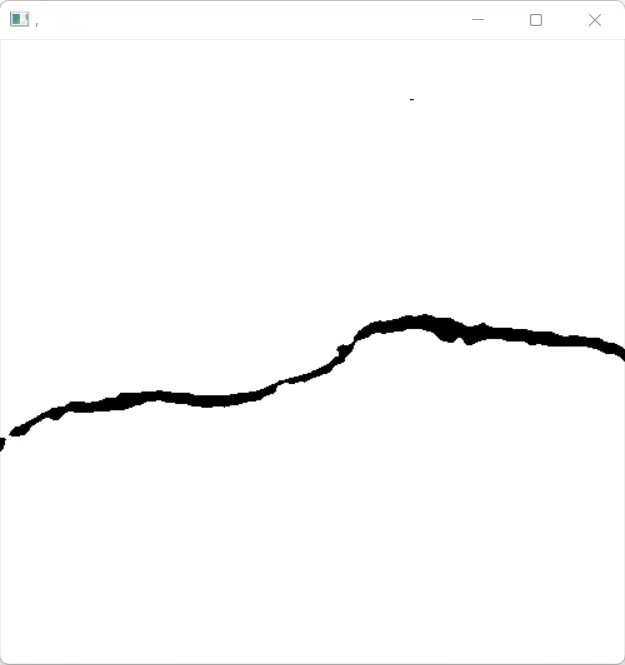
plt.show()方法二:区域生长算法
import cv2
import numpy as np
def regionGrow(img, seeds, avg_seed, thresh):
''' 进行区域生长'''
m, n = img.shape
result_img = np.zeros_like(img) # 定义保存结果图像的变量
connection = [(-1, -1), (-1, 0), (-1, 1), (0, 1), (0, -1), (1, -1), (1, 0), (1, 1)] # 定义种子点的邻域
while (len(seeds) != 0): # 只要种子向量不为空,就一直在生长
pt = seeds.pop()
result_img[pt[0], pt[1]] = 255
for i in range(8): # 迭代8连通邻域的所有像素
x = pt[0] + connection[i][0]
y = pt[1] + connection[i][1]
if x < 0 or y < 0 or x >= m or y >= n: # 判断是否超出了图像边界
continue
# 判断是否满足相似性准则
if (abs(int(img[x, y]) - int(avg_seed)) < thresh and result_img[x, y] == 0):
result_img[x, y] = 255 # 标记满足要求的像素点
seeds.add((x, y)) # 将像素点加到种子向量中
result_img = result_img.astype('uint8')
return result_img
img = cv2.imread('../data/lf2.png')
# cv2.imshow(',,', gray_img)
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
m, n = gray_img.shape
seed_set = set()
seed_set.add((81, 293))
sum_seed = 0
for item in seed_set:
sum_seed += gray_img[item[0], item[1]]
avg_seed = round(sum_seed / len(seed_set))
result_img = regionGrow(gray_img, seed_set, avg_seed, 50)
index = (result_img == 0)
img = np.ones([m,n])
img[index] = 0
cv2.imshow(',', img)
cv2.waitKey(0)
cv2.destroyAllWindows()区域生长是一种基于种子点(种子集合)的分割方法,它通过将与种子点具有相似性的邻域像素加入到种子集合中,从而将图像分割成不同的区域。以下是代码的步骤说明:
- 定义区域生长函数
regionGrow,该函数接受以下参数:
- img:待处理的灰度图像。
- seeds:种子点的集合,用于初始化生长过程。
- avg_seed:种子点的平均灰度值,用于相似性判断。
- thresh:相似性阈值,用于确定哪些邻域像素可以被加入到种子集合中。
- 读取图像
cv2.imread('../data/lf2.png')并将其转换为灰度图像gray_img。 - 初始化种子集合
seed_set,并将一个种子点(81, 293)添加到集合中。 - 计算种子点的平均灰度值
avg_seed。 - 调用
regionGrow函数进行区域生长,得到结果图像result_img。 - 将结果图像中的黑色像素点(值为0)在原始彩色图像中对应的像素点设置为白色(值为0)。
- 使用
cv2.imshow显示处理后的图像,并等待按键后关闭窗口。
以下代码均为伪代码
1. 数据增强与合成
数据增强
数据增强技术可以显著提高模型的鲁棒性,常见的增强方法包括:
- 旋转:在一定角度范围内随机旋转图像。
- 缩放:随机缩放图像大小。
- 裁剪:随机裁剪图像的一部分。
- 翻转:水平或垂直翻转图像。
- 添加噪声:在图像中添加随机噪声。
- 颜色变换:随机改变图像的亮度、对比度和饱和度。
例如,在Python中使用Albumentations库可以轻松实现这些增强方法:
import albumentations as A
from albumentations.pytorch import ToTensorV2
transform = A.Compose([
A.RandomRotate90(),
A.Flip(),
A.Transpose(),
A.OneOf([
A.IAAAdditiveGaussianNoise(),
A.GaussNoise(),
], p=0.2),
A.OneOf([
A.MotionBlur(p=0.2),
A.MedianBlur(blur_limit=3, p=0.1),
A.Blur(blur_limit=3, p=0.1),
], p=0.2),
A.ShiftScaleRotate(shift_limit=0.0625, scale_limit=0.2, rotate_limit=45, p=0.2),
A.OneOf([
A.OpticalDistortion(p=0.3),
A.GridDistortion(p=0.1),
A.IAAPiecewiseAffine(p=0.3),
], p=0.2),
A.OneOf([
A.CLAHE(clip_limit=2),
A.IAASharpen(),
A.IAAEmboss(),
A.RandomBrightnessContrast(),
], p=0.3),
A.HueSaturationValue(p=0.3),
ToTensorV2(),
])合成数据
合成数据可以增加数据集的多样性,尤其是在数据不足时非常有用。你可以使用计算机图形学技术生成合成裂缝图像,例如Blender或其他3D建模工具。
2. 多尺度检测
多尺度训练
通过使用不同尺度的输入图像进行训练,可以使模型更好地适应不同尺寸的裂缝。例如,在训练时可以随机缩放输入图像。
scales = [0.5, 1.0, 1.5]
for epoch in range(num_epochs):
for images, targets in dataloader:
scale = random.choice(scales)
images = F.interpolate(images, scale_factor=scale, mode='bilinear')
outputs = model(images)
loss = criterion(outputs, targets)
loss.backward()
optimizer.step()多尺度预测
在推理阶段,可以使用多尺度的输入图像进行检测,并融合结果以提高检测精度。
scales = [0.5, 1.0, 1.5]
results = []
for scale in scales:
scaled_images = F.interpolate(images, scale_factor=scale, mode='bilinear')
outputs = model(scaled_images)
results.append(outputs)
final_results = merge_results(results)3. 自监督学习与迁移学习
自监督学习
自监督学习可以在没有标签的大量数据上预训练模型。例如,使用自编码器或对比学习方法预训练模型,然后将这些特征用于裂缝检测任务。
from simclr import SimCLR
model = SimCLR(base_model='resnet50')
optimizer = torch.optim.Adam(model.parameters(), lr=1e-3)
for epoch in range(num_epochs):
for images in dataloader:
loss = model(images)
optimizer.zero_grad()
loss.backward()
optimizer.step()迁移学习
从预训练的模型(例如,在ImageNet上训练的ResNet)进行迁移学习,可以利用其强大的特征提取能力。
import torchvision.models as models
model = models.resnet50(pretrained=True)
model.fc = nn.Linear(model.fc.in_features, num_classes)
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=1e-4)
for epoch in range(num_epochs):
for images, labels in dataloader:
outputs = model(images)
loss = criterion(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()4. 结合其他传感器数据
使用多模态数据融合技术,将视觉数据与其他传感器数据(如红外成像、超声波检测)结合,能够增强模型的检测能力。例如,可以将多模态数据输入到一个多输入模型中进行联合训练。
class MultiModalNet(nn.Module):
def __init__(self):
super(MultiModalNet, self).__init__()
self.visual_branch = models.resnet50(pretrained=True)
self.infrared_branch = models.resnet50(pretrained=True)
self.fc = nn.Linear(self.visual_branch.fc.in_features + self.infrared_branch.fc.in_features, num_classes)
def forward(self, x_visual, x_infrared):
x_visual = self.visual_branch(x_visual)
x_infrared = self.infrared_branch(x_infrared)
x = torch.cat((x_visual, x_infrared), dim=1)
x = self.fc(x)
return x5. 在线学习与自适应学习
在线学习
设计一个系统,使模型能够在实际应用中不断从新数据中学习和改进。例如,可以使用在线学习算法在新数据到达时更新模型。
from sklearn.linear_model import SGDClassifier
model = SGDClassifier()
for new_data, new_labels in data_stream:
model.partial_fit(new_data, new_labels, classes=classes)自适应学习
使模型能够根据环境和条件的变化自动调整自身参数,例如使用域自适应技术。
from torch.utils.data import DataLoader
from dann import DomainAdversarialNN
source_loader = DataLoader(source_dataset, batch_size=batch_size, shuffle=True)
target_loader = DataLoader(target_dataset, batch_size=batch_size, shuffle=True)
model = DomainAdversarialNN()
for epoch in range(num_epochs):
for (source_data, source_labels), (target_data, _) in zip(source_loader, target_loader):
loss = model(source_data, source_labels, target_data)
optimizer.zero_grad()
loss.backward()
optimizer.step()6. 高效模型压缩与部署
模型压缩
使用模型剪枝、量化和知识蒸馏等技术,减少模型的计算复杂度和内存占用。
import torch.quantization
model = models.resnet50(pretrained=True)
model.eval()
model_fused = torch.quantization.fuse_modules(model, [['conv1', 'bn1', 'relu']])
model_int8 = torch.quantization.convert(model_fused)边缘计算与云端协同
在边缘设备上进行初步检测,然后将结果传送到云端进行进一步处理和分析。
edge_result = edge_device.detect(image)
if edge_result.confidence < threshold:
cloud_result = cloud_server.analyze(image)7. 开发用户友好的检测系统
实时监控与报警系统
开发一个实时监控系统,结合YOLOv8模型进行实时裂缝检测,并在检测到裂缝时自动发出警报。
import cv2
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
if not ret:
break
results = model(frame)
if results.contains_crack():
alert_system.trigger_alarm()
cv2.imshow('Crack Detection', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()可视化工具
开发一个交互式的可视化工具,帮助用户直观地查看检测结果和裂缝位置。
import dash
import dash_core_components as dcc
import dash_html_components as html
app = dash.Dash(__name__)
app.layout = html.Div([
dcc.Graph(id='crack-detection-results')
])
@app.callback(
Output('crack-detection-results', 'figure'),
Input('image-upload', 'contents')
)
def update_graph(contents):
image = parse_contents(contents)
results